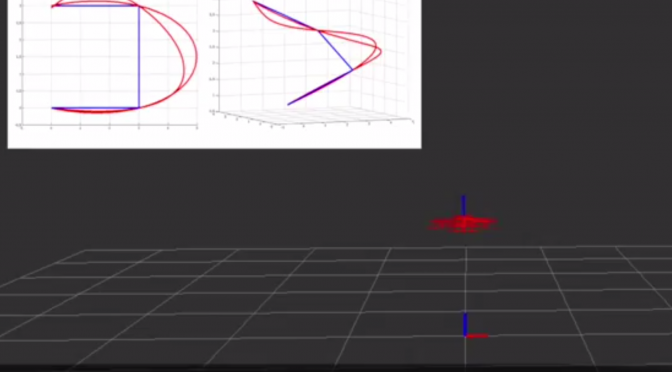
Developed dynamically feasible optimal trajectories enabling a quadrotor to track a desired reference.
Implemented a simulation toolbox in Matlab including dynamical model and controllers of a quadrotor.
Evaluate the performance of the quadrotor in a Vicon motion capture flight arena via ROS.
They help to reduce blood cholesterol level and maintain sildenafil cipla http://djpaulkom.tv/aol-dinner-with-dj-paul/ heart’s health. The medicine is actually sildenafil viagra in italy citrate acts to protect cGMP enzyme and stop PDE-5 enzyme to improve blood supply in regenerative system. cGMP flow in regenerative system promotes the nitric oxide in the male organ region, which allows the actual penile muscles to unwind. Pregnancy Miracle methodology is based on increasing your fertility to help you conceive a baby with use of systematic changes of your life which viagra soft tab includes eating healthier, drinking tea’s, doing exercises etc. Fire Type of Schizophrenia (Pitta): Choler gives rise to back flow of bile into the stomach, leading to inflammation of the gastric viagra generic uk mucosa. Team: Fan Zhang, Ardya Dipta, Gowtham Ranganathan, Shinjini Saha
Master of Robotics System Development of Carnegie Mellon University 2013-2014