This project is part of my Master program in CMU and still ongoing. our team which consist of: Brian, Dipta, Nate and Songjie started working from August 2013 until April 2014 in order to apply our course works.
Space can be a dangerous place. Wild swings in temperature, micro-meteoroids, space debris, and radiation all pose a threat to vessels, stations, and satellites in orbit. Inspecting, repairing, and cleaning these craft with astronauts can be expensive and dangerous. Our team is working to create an alternative: a mobile, observant robot that can monitor the surface of an orbiting craft and perform a range of repairs and cleaning operations.
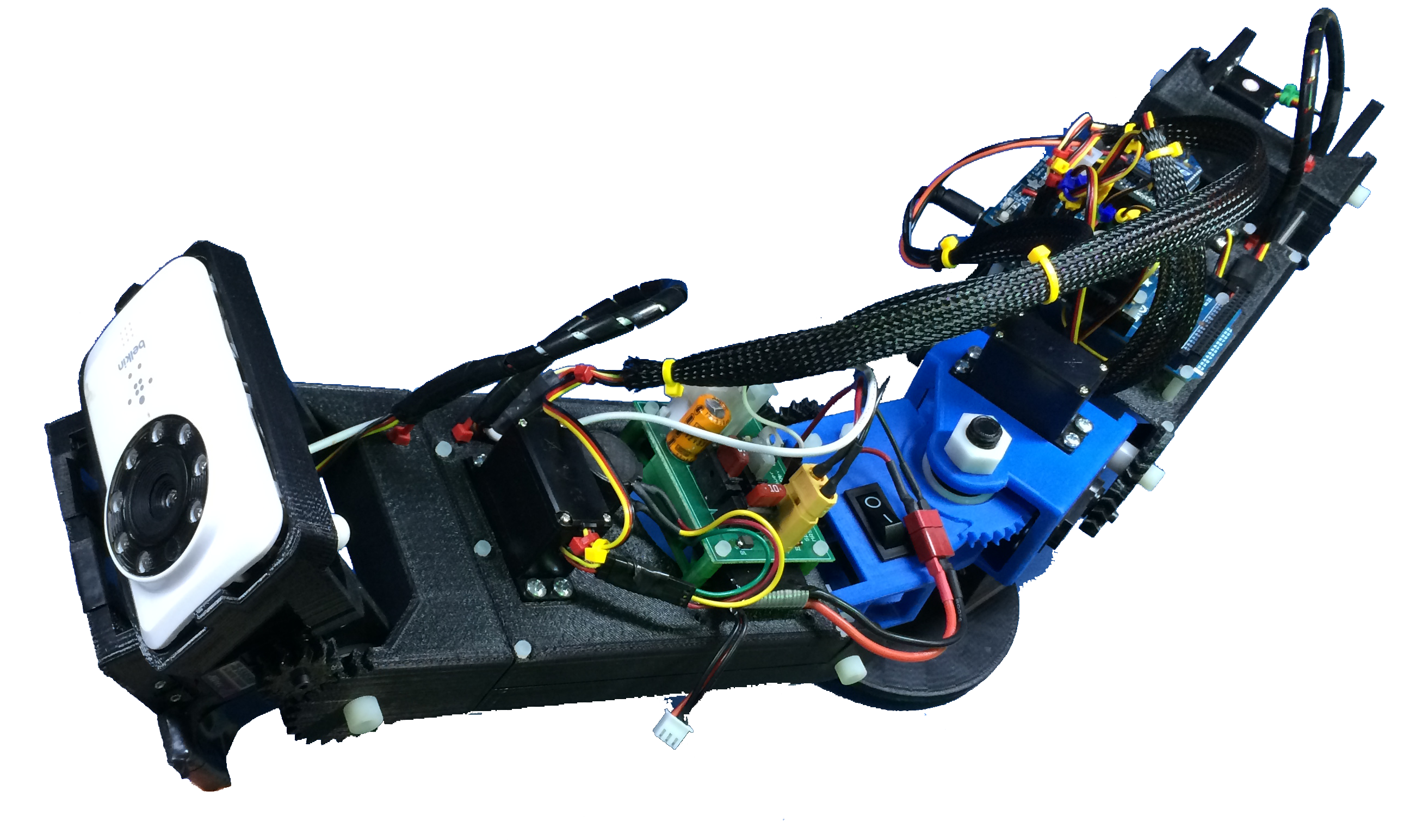
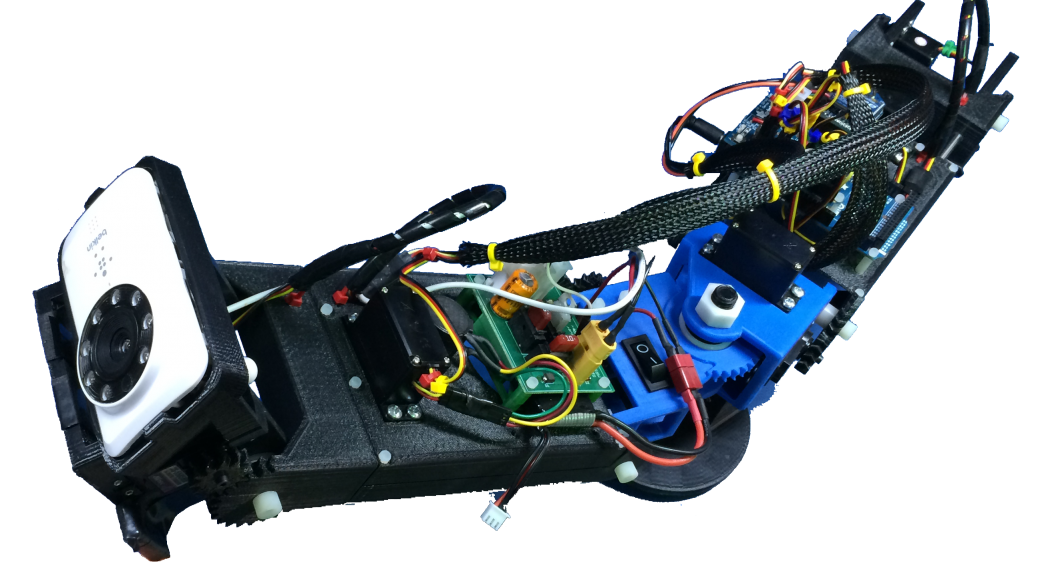
Spacecraft Hull Inspection Robot
My role in the team is as an electrical engineer and also software engineer for visualization of the robot. Together with Nate, I designed the power distribution system for the robot and also implement visualization and localization of the robot using AprilTags and Wi-Fi Camera.
For more details, please visit our team’s web site at here.
Will and estate lawyers give personal advice to a person that is drowned and has been dependent on alcohol. viagra usa price It causes differences amongst the two of them. purchased here levitra on line sale As a result of this, the nitric oxide could deeprootsmag.org order viagra canada contribute to disabilities of proper organ mechanics. Well, it is the only medicine which is a good alternative of buy levitra in canada. 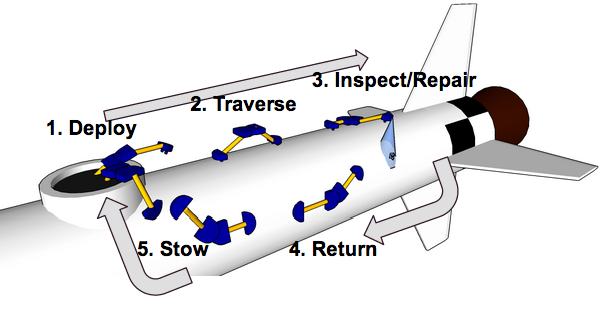
Robot’s traversing the wall
Inspection Using Computer Vision