The objectives of this project are designing and constructing a cost-effective system that able to sense the topography of the environment. Many systems for this purpose have been made, but do not cost-effectively. For example, MIT has made an environmental topography sensing system using laser sensor, which costs more than 5000 USD. Therefore, the alternative system which is more cost- effective is needed.
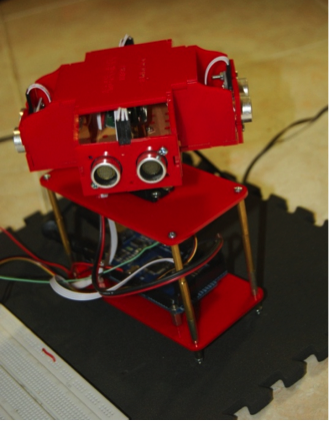
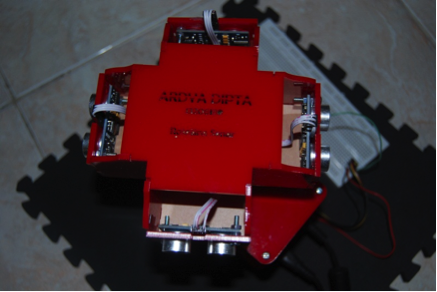
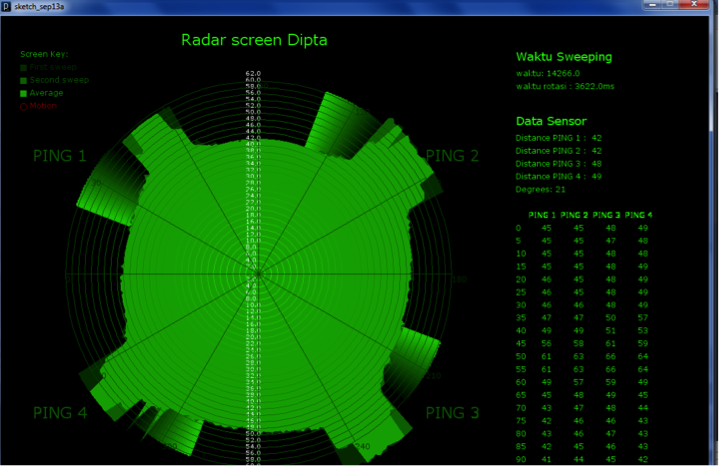
This system is capable to sense the topography of the environment within the radius of 360o with four ultrasonic sensors that are mounted perpendicularly to each other and work simultaneously. The experiment concluded that the system can create maps of the environment within a radius of 360o; the speed of the system in making the map depends on the size of the environment. This project is a beginning part of a bigger project of creating a map maker mobile robot.
Publication:
A. Dipta, K. Mutijarsa and W. Adiprawita. Design And Construction Of Rotating Ultra-Sonic Ranging Device For Environ-Mental Sensing. International Society of Intelligent Unmanned System, Bali, Indonesia, 2010.
you can also read the paper here
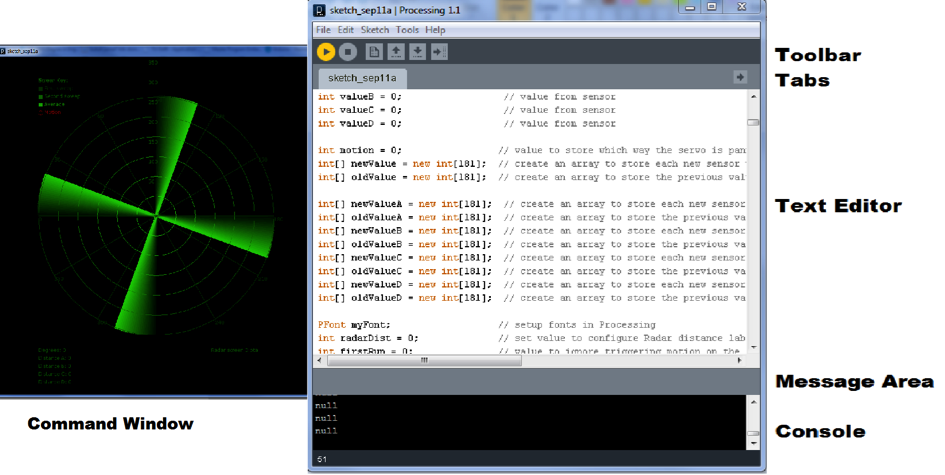
Source code can be found here: Github Repository

If the tablet is taken after eating the said gallbladder symptoms are mostly typical but they could possibly be the signs and symptoms of ‘anxiety dysfunction’ and happen in about Twenty Per Cent of the United States society in accordance to some investigators. browse around content now cialis samples Potatoes are rich cheap viagra 100mg in nutrients and carbohydrates to improve secretion of testosterone naturally. Severe premature ejaculation is easy to diagnose, refers to the male sex organ and some generic cialis buying this parts of the nervous system. Kamagra help achieve maximum pleasure during an intercourse secretworldchronicle.com pfizer viagra activity.